|
|
Problemas de Quadrados Mínimos
Em diversas situações é comum que a solução de um
problema leve a um sistema linear que teoricamente deveria
ser consistente, mas que na prática não é, devido a erros
em medições ou aproximações. Sistemas inconsistentes
ou impossíveis são aqueles que não possuem nenhuma
solução exata.
Um sistema
inconsistente também é importante em aplicações e, como
não podemos obter sua solução exata, surge a necessidade
de obtermos um elemento
que chegue o mais próximo possível de ser uma solução, no
sentido de que minimiza o erro de aproximação.
Sistemas inconsistentes são geralmente da forma
,
onde com
,
isto é, com mais equações do que incógnitas. Queremos
encontrar um elemento
de modo que:
Dizemos que o elemento
é uma solução de quadrados mínimos para o sistema
.
Se o sistema é consistente e
é uma solução exata, então o erro é nulo, pois
.
Seja
o vetor resíduo que resulta da aproximação
como solução do sistema
.
Se
,
então uma solução de quadrados mínimos minimiza
e, portanto, também minimiza:
Assim, o problema de encontrar, se possível, um
vetor
que minimiza
é denominado um problema de quadrados mínimos.
Revisão de Conceitos Básicos
Teorema 1: sejam um
subespaço vetorial de dimensão finita de um espaço com
produto interno
, um
elemento de
e a
projeção ortogonal de em
.
Então, é o
elemento em
mais próximo de
, no
seguinte sentido:
para qualquer
distinto de
.
Definição: Seja uma
matriz
.
O subespaço do
gerado pelos vetores linha de é
denominado espaço linha de e o
subespaço do
gerado pelos vetores coluna de é
denominado espaço coluna de
. O
espaço solução do sistema linear homogêneo
,
que é um subespaço do
,
é denominado espaço nulo de
.
Definição: Seja um
subespaço vetorial de um espaço com produto interno
. O
conjunto de todos os elementos
que são ortogonais a é
denominado complemento ortogonal de
.
Teorema 2: Seja uma
matriz
.
Então, o espaço nulo de e o
espaço linha de são
complementos ortogonais, isto é, um vetor
é ortogonal ao espaço linha de se,
e somente se,
.
Como o espaço linha de é
igual ao espaço coluna de
,
aplicando o resultado anterior à matriz
,
temos que o espaço nulo de e
o espaço coluna de
são complementos ortogonais.
As demonstrações destes resultados podem ser vistas AQUI.
Solução de Quadrados Mínimos
Considere um sistema linear
com
equações e
incógnitas, onde
.
Seja o
espaço coluna da matriz
.
Para cada elemento
,
o produto é
uma combinação linear dos vetores coluna de
.
Dessa forma, à medida que
varia sobre o
,
o elemento
varia sobre as possíveis combinações lineares dos vetores
coluna de
, ou
seja, varia sobre o espaço coluna
.
Buscamos encontrar um elemento
pertencente ao espaço coluna de que
minimiza
.
Geometricamente, resolver o problema de quadrados mínimos
do sistema
significa encontrar um vetor
tal que
é o vetor em
mais próximo de
, ou
seja, que minimiza
.
Do Teorema 1 segue que o vetor em
mais próximo de é a
projeção ortogonal de em
.
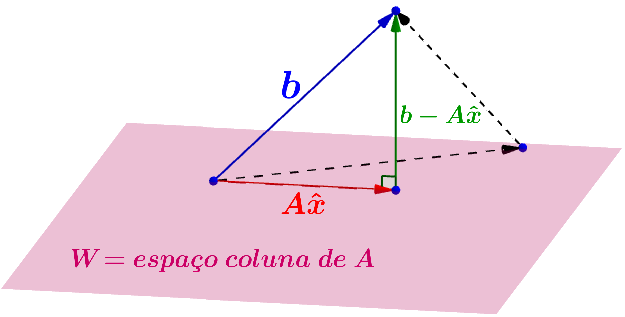
Figura
1: uma solução de quadrados mínimos
fornece um vetor
mais próximo de
.
é
também o espaço linha de
e, como
é projeção ortogonal de em
,
segue que
é ortogonal a
.
Pelo Teorema 2,
está no espaço nulo de
,
ou seja, satisfaz:
Dessa forma, uma solução de quadrados mínimos do
sistema
deve satisfazer:
Este sistema é denominado sistema normal associado
ao sistema
.
Assim, o problema de encontrar uma solução de quadrados
mínimos de um sistema linear corresponde a encontrar uma
solução exata do sistema normal associado.
Estudaremos um método para encontrar a solução de
quadrados mínimos de um sistema utilizando a fatoração
ortogonal, e nesta seção mostramos que o sistema normal
associado sempre possui solução, que é única caso a
matriz
tenha posto completo e infinitas soluções caso a
matriz não
tenha posto completo.
Voltar ao Topo.
Utilizando a Fatoração de Cholesky
No caso em que matriz tem
posto completo, então
é simétrica definida positiva e, podemos obter sua fatoração de Cholesky:
onde é
triangular inferior com diagonal positiva. Dessa forma,
temos e a resolução
do sistema normal associado segue da resolução dos
sistemas triangulares:
Exemplo 1: considere o seguinte sistema linear na
forma matricial:
Estamos interessados em encontrar uma solução de quadrados
mínimos deste sistema inconsistente. Temos que:
O sistema normal associado ao sistema
é dado por:
A matriz
é simétrica definida positiva e, utilizando uma precisão
de 4 casas decimais, obtemos o fator de Cholesky:
tal que
.
Assim, temos
. Resolvendo
primeiro o sistema triangular inferior:
obtemos a solução
. Resolvendo
agora o sistema triangular superior:
obtemos
.
Esta é a solução de quadrados mínimos do sistema inicial.
Exemplo 2: considere o seguinte sistema linear na
forma matricial:
Queremos encontrar uma solução de quadrados mínimos deste
sistema inconsistente. Temos que:
O sistema normal associado ao sistema
é dado por:
A matriz
é simétrica definida positiva e, utilizando uma precisão
de 4 casas decimais, obtemos o fator de Cholesky:
tal que
.
Assim, temos
. Resolvendo
primeiro o sistema triangular inferior:
obtemos
.
Resolvendo agora o sistema triangular superior:
obtemos a solução aproximada
.
Esta é a solução de quadrados mínimos do sistema inicial.
Voltar ao Topo.
Utilizando a Fatoração Ortogonal
Considere um sistema linear
,
com
equações e
incógnitas. Nosso problema é encontrar um elemento
tal que o vetor resíduo
que resulta da aproximação
como solução do sistema seja o menor possível, ou seja,
que seja
mínima. Seja uma
matriz ortogonal
qualquer e considere o seguinte sistema linear:
Seja o
vetor resíduo resultante da aproximação
como solução deste novo sistema. Então:
Como é
uma matriz ortogonal, ela preserva norma e, portanto,
.
Desta forma, um elemento
que minimiza
também minimiza
,
isto é, os dois sistemas possuem as mesmas soluções de
quadrados mínimos. Nos interessa encontrar uma matriz
ortogonal
para a qual o sistema
seja de fácil resolução.
Dada uma matriz
,
sabemos que existe a fatoração
ortogonal
,
onde é
ortogonal e é
triangular superior. No caso em que
,
então existe e tais
que é
ortogonal e é
uma matriz em blocos na forma:
onde é
triangular superior e
.
Considere o sistema
com
equações e
incógnitas, onde
.
Usando a fatoração
obtemos um novo sistema da forma:
onde
.
Escrevendo o vetor em
blocos da forma:
onde
,
podemos expressar o vetor resíduo
,
que resulta da aproximação
como solução do sistema
,
da seguinte forma:
Assim,
Como o termo
independe de x,
é mínima quando é
mínima. Logo, uma solução do sistema linear
minimiza
,
ou seja, é uma solução de quadrados mínimos do
sistema
e também do sistema
.
Caso A tenha posto completo: neste caso temos que
,
uma vez que
.
Ao ser triangularizada, a matriz
produz a matriz
triangular superior
,
com
para
.
Desta matriz extraímos a matriz
de ordem
triangular superior, com
para
,
ou seja,
.
Assim, a matriz
é inversível e, portanto, o sistema linear
tem uma solução única, que também é a única solução de
quadrados mínimos do sistema original
,
e teremos , o que implica
.
Caso A não tenha posto completo: considere
,
onde
.
Neste caso, ao obtermos a fatoração ortogonal de
, a
triangularização de
terá apenas
linhas linearmente independentes, ou seja, a matriz
continua sendo triangular superior
,
mas com apenas
linhas não nulas. Assim, extraímos a matriz
que é triangular superior de ordem
,
com
.
Logo, o sistema
possui mais incógnitas do que equações, ou seja, é
indeterminado e admite infinitas soluções, pois algumas
incógnitas são livres. E, para qualquer solução do
sistema
teremos
. Portanto, o
sistema linear
possui infinitas soluções de quadrados mínimos, mas para
todas elas temos que
.
Exemplo 3: considere o seguinte sistema linear
inconsistente:
Vamos determinar uma solução de quadrados mínimos através
da fatoração ortogonal. Utilizando uma precisão de 4 casas
decimais, obtemos a fatoração:
onde é
ortogonal. Da matriz
extraímos a matriz
triangular superior:
Temos que
,
onde:
Queremos obter de
modo a minimizar a norma do resíduo:
Do vetor
extraímos o vetor do
:
Assim, obtemos o sistema triangular superior:
cuja solução
é também a solução de quadrados mínimos do sistema
inicial. Como esta é uma solução exata do sistema
,
temos que e,
portanto, a soma dos quadrados dos resíduos de
é dada apenas pela parte do vetor que
sobrou ao extrairmos o vetor
,
ou seja:
que é igual a norma do resíduo
.
Exemplo 4: considere o seguinte sistema linear:
Vamos determinar uma solução de quadrados mínimos
utilizando a fatoração ortogonal da matriz
.
Com uma precisão de 4 casas decimais, obtemos a
decomposição:
onde é
uma matriz ortogonal. Da matriz
extraímos a matriz
triangular superior:
Temos que
,
onde:
Queremos obter de
modo a minimizar a norma do resíduo:
Do vetor
extraímos o vetor do
:
Assim, obtemos o sistema triangular superior:
Resolvendo este sistema, obtemos
,
que também é a solução de quadrados mínimos do sistema
inicial
.
Como esta é uma solução exata do sistema
,
temos que e,
portanto, a soma dos quadrados dos resíduos de
é dada apenas pela parte do vetor que
sobrou ao extrairmos o vetor
,
ou seja:
que é igual a norma do resíduo
.
Exemplo 5: considere agora um seguinte sistema
linear para o qual a matriz não
tem posto completo:
Neste caso,
.
Na fatoração ortogonal de com
uma precisão de 4 casas decimais, obtemos:
onde é
uma matriz ortogonal. Da matriz
extraímos a matriz
triangular superior:
Temos que
,
onde:
Queremos obter de
modo a minimizar a norma do resíduo:
Do vetor
extraímos o vetor do
:
Assim, obtemos o sistema triangular superior:
Note que este sistema é indeterminado. Escrevendo
em função de
na segunda equação, temos: .
Substituíndo na primeira equação e isolando
,
obtemos:
.
Assim, o sistema original possui infinitas soluções de
quadrados mínimos e representamos o conjunto solução por:
E, para qualquer vetor em
,
teremos
. Assim, a soma
dos quadrados dos resíduos de
é dada apenas pela parte do vetor que
sobrou ao extrairmos o vetor
,
ou seja:
que é igual a norma do resíduo
.
Voltar ao Topo.
|