|
|
Definição:
Uma cônica em
é um conjunto de pontos cujas coordenadas, em relação à
base canônica, satisfazem a equação geral:
onde A ou B ou C é diferente de zero.
é a forma quadrática da cônica,
a forma linear e F é o termo constante.
Uma cônica pode ser classificada como: circunferência,
elipse, parábola ou hipérbole. Dada uma equação na
forma geral, estamos interessados em classificar qual é
o tipo de cônica de modo a facilitar seu estudo e
representação gráfica.
Da Geometria
Analítica sabemos que esses tipos de cônicas possuem
equações na forma reduzida dadas por:
- Equação reduzida da elipse, com centro
na origem do sistema de coordenadas:
onde
e
são os vértices da elipse. Observe que uma
circunferência é uma elipse onde
,
que é o raio da circunferência
.
- Equação reduzida da parábola, com
vértice na origem do sistema de coordenadas:
onde a primeira equação representa uma parábola com foco
,
a segunda com foco
,
a terceira com foco
,
e a quarta uma parábola com foco
.
- Equação reduzida da hipérbole, com
centro na origem do sistema de coordenadas:
onde a primeira equação representa uma hipérbole com
focos no eixo e
vértices
,
e a segunda uma hipérbole com focos no eixo e
vértices
.
As equações das cônicas representadas
acima estão na forma reduzida, onde temos B = 0, se
,
D = 0 e se
,
E = 0. Veremos que é possível, através de uma mudança de
referencial conveniente, levar a equação geral de uma
cônica até a forma reduzida, a fim de facilitar a sua
classificação e estudo. Para isso utilizaremos conceitos
de autovalores e autovetores, e a diagonalização de
matrizes.
Voltar
ao Topo.
Exemplo 1: Considere a equação
da cônica:
,
em coordenadas canônicas do
.
Esta equação não está na forma reduzida, e não sabemos
definir qual é o tipo de cônica. Mas, podemos escrevê-la
como:
Fazendo uma mudança de referencial da forma:
e
,
obtemos:
E assim, podemos identificar a cônica como sendo uma
circunferência de raio 2, centrada no ponto
,
com relação ao referencial canônico
.
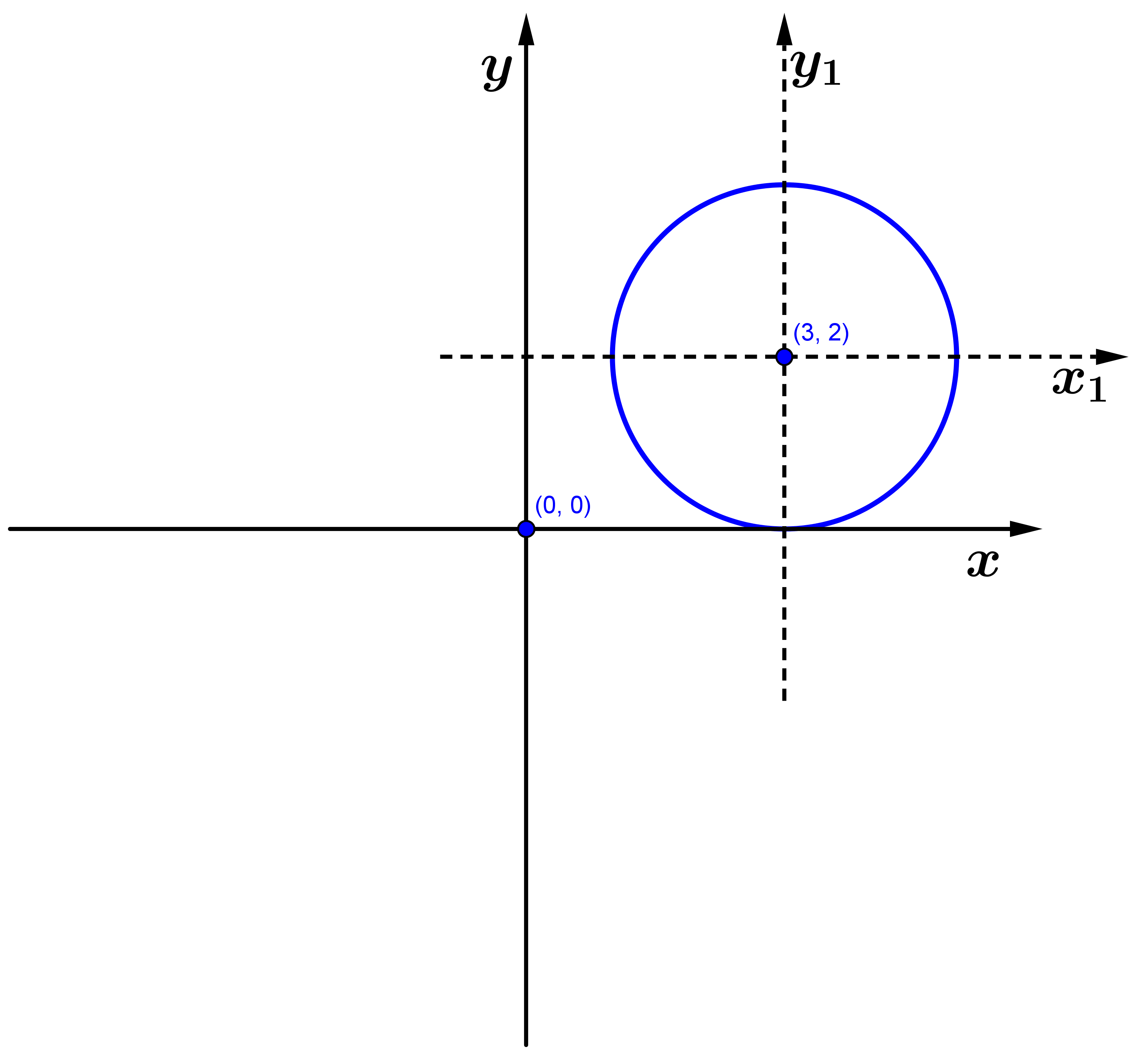
A circunferência
no referencial
é a mesma circunferência
no referencial
.
Considere a equação geral da
cônica em coordenadas canônicas do
,
dada por:
Para obter a cônica na forma reduzida em um
outro referencial do
,
procedemos da seguinte forma:
Passo 1: Escrevemos a equação da cônica
na forma matricial:
Observe que se a matriz
for diagonal, teremos que B = 0 e assim
eliminamos o termo misto
da equação da cônica. Observe que a matriz M é sempre simétrica,
o que implica que ela é sempre diagonalizável, por isso
podemos utilizar a diagonalização para eliminar o termo
misto da equação.
Passo 2: Diagonalizamos a matriz M para
eliminar o termo misto, para isso precisamos encontrar
os autovalores
e
e os autovetores ortonormais
e
de M. Faremos então uma mudança de referencial, de modo
a obter a equação da cônica com coordenadas em relação a
um referencial cujos eixos são determinados pelos
autovetores ortonormais da matriz M, ou geometricamente,
um ponto
representado no sistema canônico de base
será representado no sistema de base
,
onde
e
são os autovetores ortonormais da matriz M, e serão os
vetores diretores dos eixos da cônica. De acordo com o
que é estudado em ortogonalização de Gram-Schmidt,
sabemos que toda base pode ser ortonormalizada. Logo, se
temos uma base formada por autovetores de uma matriz,
esta base pode ser ortonormalizada.
Sabemos que a matriz M pode ser diagonalizada
considerando como matriz diagonalizante U, a matriz
cujas colunas são autovetores linearmente independentes
de M e como matriz diagonal D, a matriz cujas entradas
da diagonal são os autovalores de M:
Dessa forma, temos
.
Passo 3: Fazemos uma mudança de
referencial. Considere a base canônica
e a base
.
Observe que a matriz de mudança da base canônica para a
nova base de autovetores é exatamente a matriz U. Além
disso, a existência do termo misto indica que a cônica
está rotacionada em relação aos eixos canônicos, e
então, U é a matriz de rotação, isto é, a matriz U é
sempre da forma:
onde
é o ângulo de rotação. Observe que
,
uma vez que U é formado por vetores de uma base
ortonormal, ou seja,
.
Assim, temos
.
Um ponto
no referencial canônico pode ser representado no novo
referencial
da forma:
Assim, a forma quadrática da cônica fica:
E a forma linear se reduz a:
Substituíndo na equação geral da cônica,
obtemos sua equação na nova base de autovetores
:
Nesta nova equação o termo misto não aparece e
a classificação da cônica se torna mais simples.
Passo 4: Se a nova equação da cônica
possuir ambos os termos, quadrático e linear, em
ou em
,
completamos o quadrado para cada um deles, a fim
de juntar esses termos em um único termo com
e um termo com
.
Por fim, realizamos uma nova mudança de referencial
conveniente, obtendo a equação da cônica na forma
reduzida no novo referencial
.
E logo, podemos classificá-la e representá-la
graficamente.
Voltar ao Topo.
Exemplo 2: Considere
a equação geral da cônica:
Escrevendo esta equação na forma matricial,
temos:
Vamos diagonalizar a matriz
para
eliminar o termo misto da equação. Para isso,
encontramos os autovalores e autovetores de M. O
polinômio característico de M é:
As raízes de
são:
Portanto,
e
são os autovalores de M. Para
,
temos que:
Assim, os autovetores de M associados ao
autovalor
são da forma:
Um
autovetor normalizado é:
Para o autovalor
,
temos que:
Assim, os autovetores de M associados ao
autovalor
são da forma:
E
um autovetor normalizado é:
Portanto, a matriz M pode ser diagonalizada,
com U a matriz diagonalizante e D a matriz diagonal,
dadas por:
Dessa forma, temos que
.
Os autovetores
e
são vetores diretores dos eixos da cônica. Fazemos então
uma mudança de coordenadas da base canônica do
para a base
. Observe que U é a matriz de mudança de base, e
portanto é a matriz de rotação do novo referencial.
Assim, temos:
Isto é, a cônica está rotacionada de um ângulo
,
no sentido horário, com relação aos eixos canônicos.
Como U é a matriz de mudança da base canônica
para a base
,
um elemento com coordenada
na nova base é da forma:
Portanto, a forma quadrática da equação da
cônica se torna:
E a forma linear se torna:
Logo, a equação da cônica no novo referencial
fica:
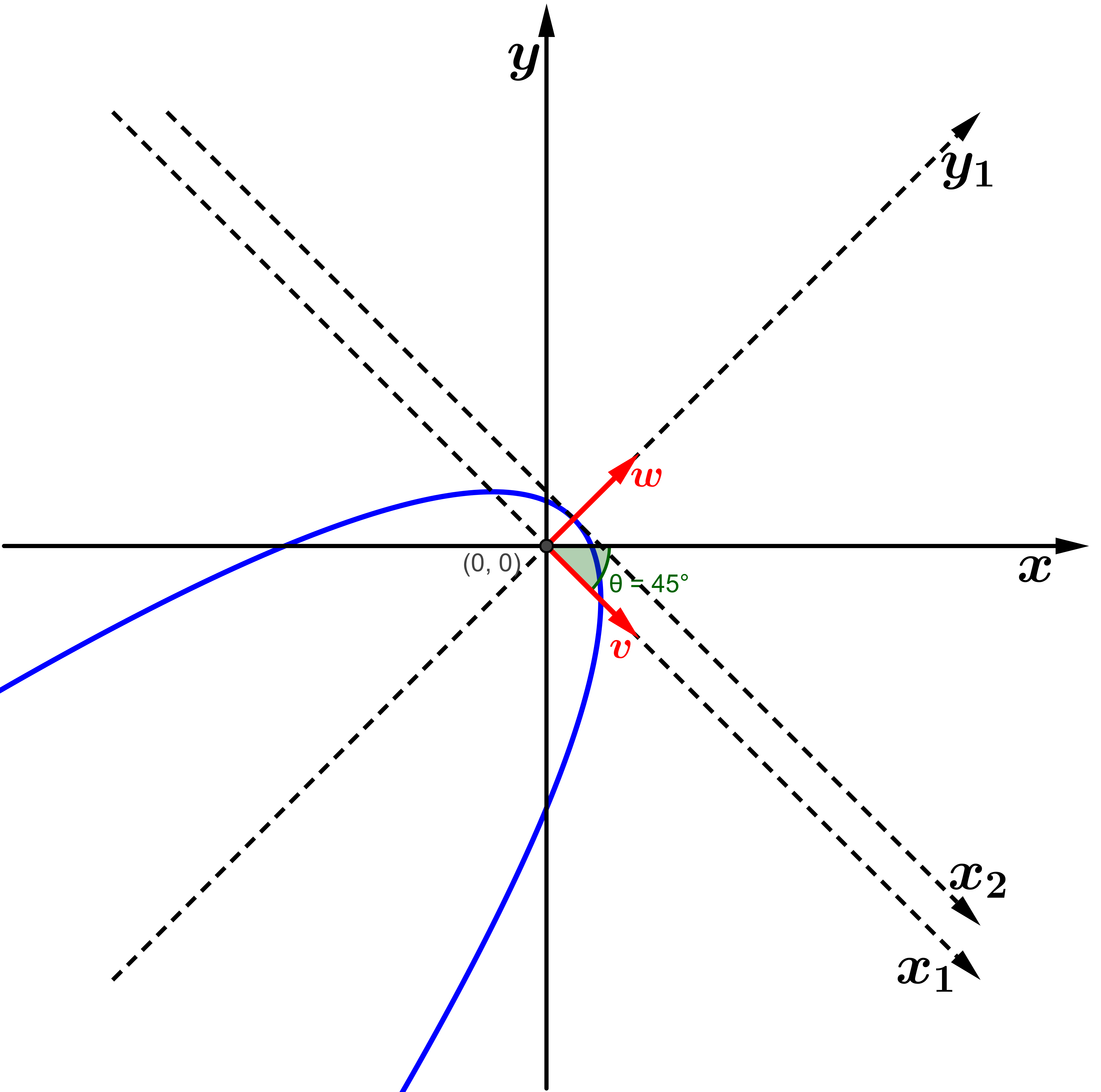
Fazendo uma nova mudança de referencial
e
.
A equação se reduz a:
Portanto, podemos classificar a cônica como uma
parábola. O foco da parábola no sistema de
coordenadas
é
.
E logo, no sistema
o foco é
e portanto, no sistema
o foco da parábola é a origem
.
O vértice da parábola é a origem do sistema
.
A cônica
é uma parábola.
Exemplo 3:
Considere a cônica de equação geral:
Escrevendo esta equação na forma matricial,
temos:
Vamos diagonalizar a matriz
para eliminar o termo misto da equação. O polinômio
característico de M é dado por:
as raízes do polinômio característico são dadas
por:
Assim,
e
são autovalores de M. Para o autovalor
,
temos:
Assim, os autovetores de M associados ao
autovalor
são da forma:
E um vetor normalizado é:
Para o autovalor
,
temos:
Assim, os autovetores de M associados ao
autovalor
são da forma:
E um vetor normalizado é:
Portanto, a matriz M é diagonalizável e temos U
a matriz diagonalizante e D a matriz diagonal dadas por:
Temos
.
Vamos realizar uma mudança de referencial da base
canônica do
para a base de autovetores
.
A matriz U é a matriz que a realiza a mudança de base.
Observe que os vetores dessa nova base são ortonormais e
irão formar os eixos diretores da cônica. Esses eixos
estão rotacionados com relação aos eixos canônicos, e U
é a matriz de rotação. Assim, temos:
Ou seja, a cônica está rotacionada de um ângulo
,
no sentido horário, com relação aos eixos canônicos.
Agora, como U é a matriz de mudança de base, um
ponto
no novo referencial é escrito como:
Logo, substituíndo na forma quadrática da
equação da cônica:
E na forma linear temos:
Portanto, a equação da cônica no
referencial
fica:
Completando o quadrado para o termo em
temos:
Fazendo uma nova mudança de referencial:
e
,
e substituindo na equação da cônica, temos:
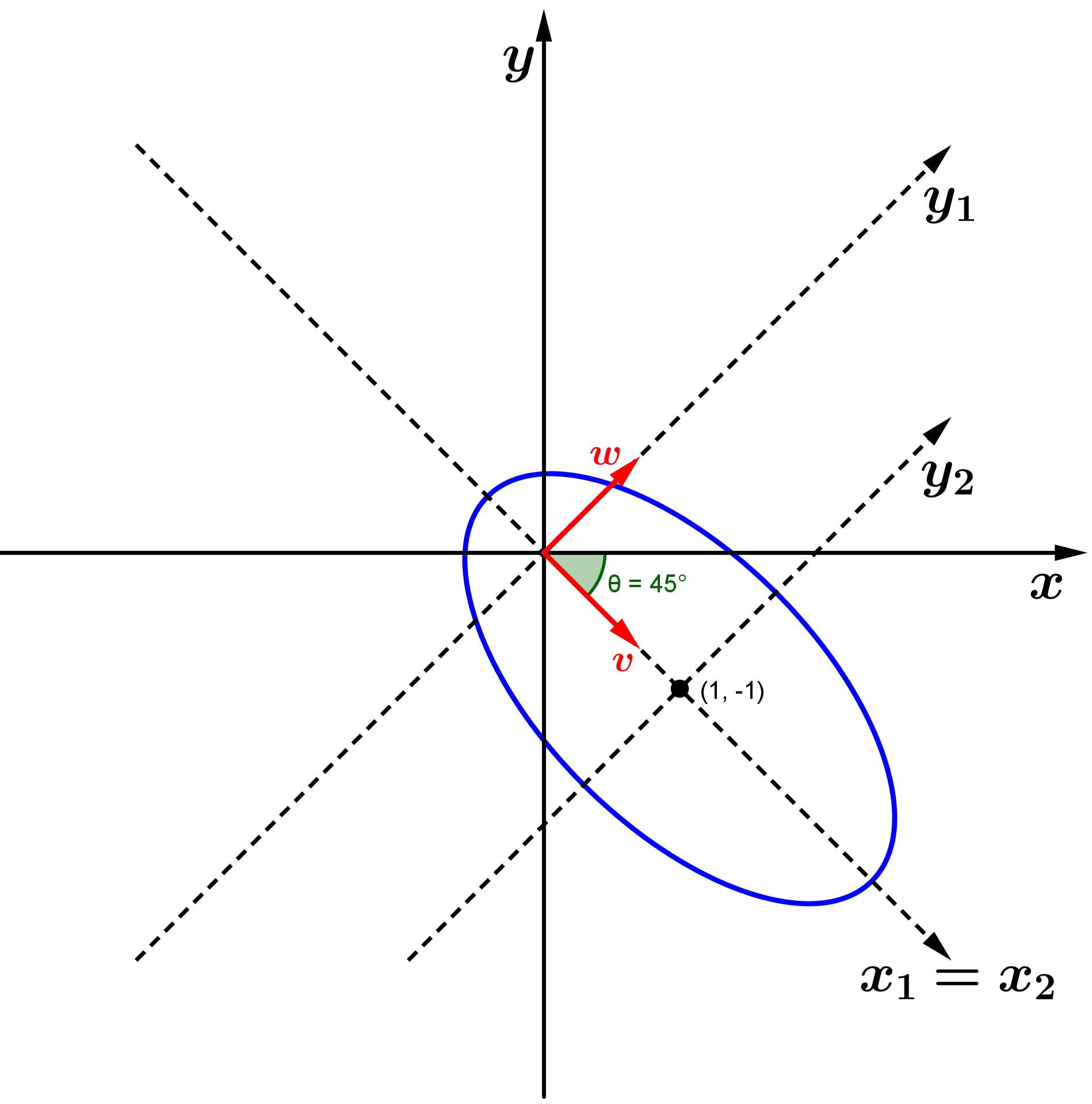
Portanto, podemos identificar a cônica como
sendo uma elipse, com eixo maior igual a 2 e
eixo menor igual a 1, rotacionada de um ângulo de
no sentido horário e transladada uma distância
em relação ao eixo
,
cujo vetor diretor é
,
logo, a elipse está centrada em
.
A cônica
é uma elipse.
|