|
|
Um
problema comum em experimentos científicos é o de obter
uma relação matemática
entre duas variáveis e
,
isto é, obter uma curva que se ajuste aos pontos
correspondentes a um conjunto de dados obtidos
experimentalmente:
Normalmente, temos alguma razão teórica para acreditar que
estes pontos pertencem a uma mesma reta, parábola ou outro
gráfico de função. Na prática, como os dados são obtidos
experimentalmente, temos alguns erros de medição, o que
torna impossível encontrarmos uma curva que se ajuste
perfeitamente a todos os pontos. Assim, a ideia é escolher
uma curva, determinando seus coeficientes, que melhor se
ajusta aos dados.
Queremos obter uma função
, tal que:
Como estas equações não podem ser satisfeitas
simultaneamente, procuramos uma função
que minimize os erros:
Seja
o vetor de resíduos
.
Nosso problema pode ser resolvido minimizando
,
que é o mesmo que minimizar:
Este é denominado um problema de quadrados mínimos
discreto, pois ajustamos uma curva a uma quantidade
discreta (finita ou infinita enumerável) de dados. O caso
contínuo, no qual buscamos ajustar uma curva a uma
quantidade contínua de dados, não será estudado neste
texto.
Caso Linear
Considerando que obtivemos uma tabela de pontos
,
com
pertencentes a um intervalo
,
o problema de ajuste de curvas consiste em escolher
funções
,
contínuas em
e obter
constantes
tais que a função dada por:
seja a mais próxima possível de
.
Dizemos que este é um modelo matemático linear, pois os
coeficientes
aparecem linearmente. As funções
podem ser funções não lineares de e a
escolha destas funções é feita observando o gráfico dos
pontos tabelados ou com base na teoria do experimento que
forneceu os pontos.
Em geral ocorre que
e, ao considerarmos que os pontos
satisfazem a equação
,
obtemos um sistema linear inconsistente, para o qual
queremos encontrar uma solução de quadrados mínimos.
Digamos, por exemplo, que queremos ajustar um
polinômio
aos pontos:
determinados. Consideramos que estes pontos satisfazem
,
para
,
isto é:
Este sistema de equações pode ser escrito na forma
matricial como:
Em geral, o grau do polinômio é bem menor que a quantidade
de dados, ou seja,
,
e este sistema é inconsistente. Neste caso, os
coeficientes
do polinômio cujo gráfico melhor se ajusta aos dados podem
ser obtidos como uma solução de quadrados mínimos
lineares.
Caso Não Linear
Em alguns casos, a expressão analítica para a curva de
ajuste não é linear nos parâmetros
,
e temos que aplicar o método dos quadrados mínimos não
lineares.
Por exemplo, se a curva de ajuste for
significa que de alguma forma os pontos tabelados se
aproximam do gráfico desta curva, isto é:
Para modelar este problema de forma linear, rearranjamos a
expressão aplicando propriedades do logaritmo da seguinte
forma:
Chamando
,
e
,
concluímos que se se
aproxima de
,
então
se aproxima de uma função linear em
:
. Utilizamos
o método de quadrados mínimos lineares para determinar os
coeficientes
e
,
e posteriormente obtemos
e
.
Voltar ao Topo.
Exemplos
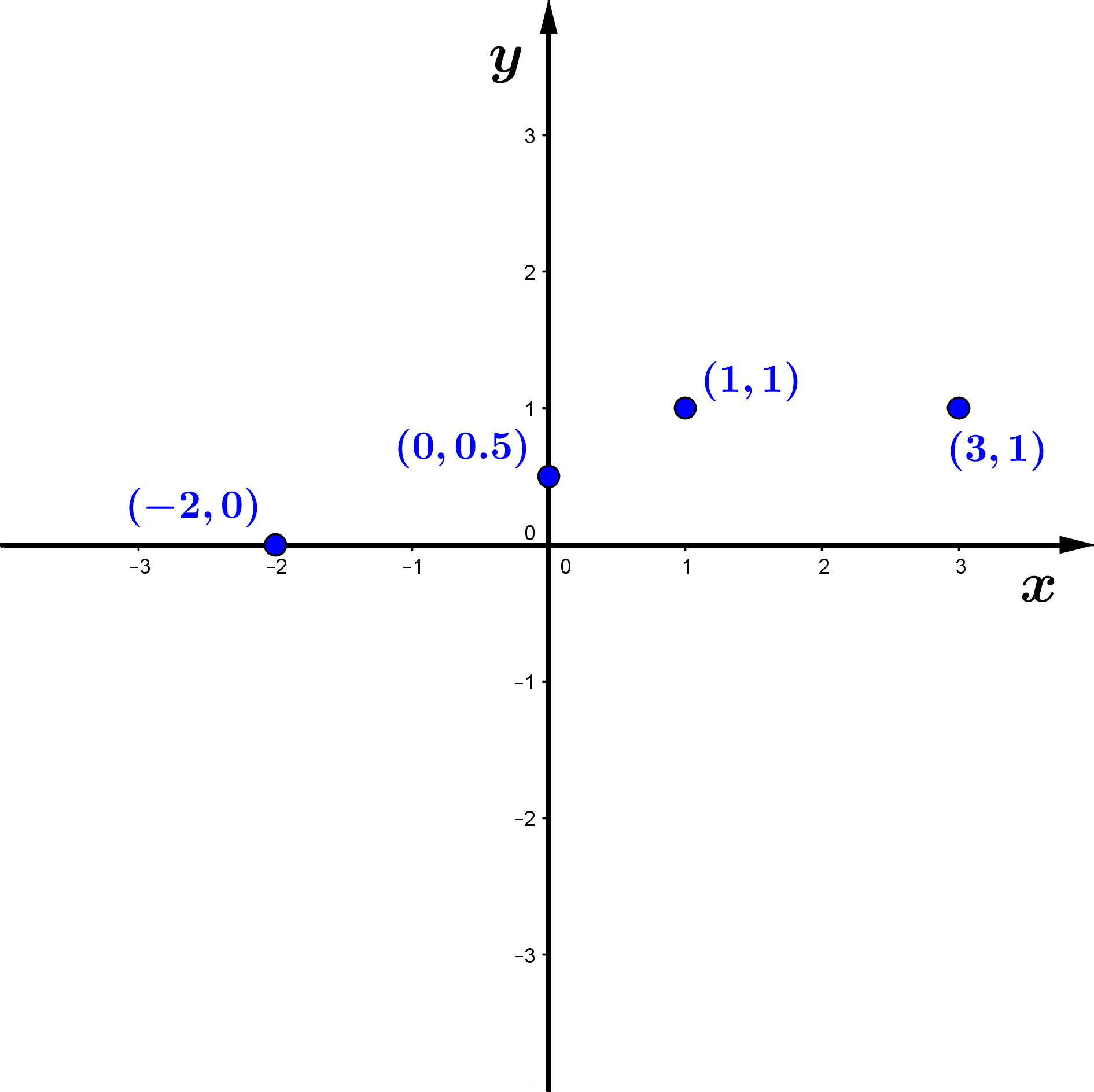
Exemplo 1: suponha que obtivemos os seguintes
pontos experimentalmente:
e
.
Analisando os pontos no plano cartesiano, notamos que uma
função linear é uma boa opção de ajuste aos pontos
obtidos:
Figura 1: uma função linear é uma opção
de ajuste aos pontos
e
.
Queremos encontrar um polinômio da forma
.
Supondo que todos os pontos satisfazem a equação
polinomial, então:
Escrevemos este sistema na forma matricial:
Vamos determinar uma solução de quadrados mínimos deste
sistema, utilizando a fatoração ortogonal da matriz
.
Com uma precisão de 4 casas decimais, obtemos:
onde é
uma matriz ortogonal. Da matriz
extraímos a matriz
triangular superior:
Temos que
,
onde:
Do vetor
extraímos o vetor:
Assim, temos o seguinte sistema triangular superior:
cuja solução
é também uma solução de quadrados mínimos do sistema
inicial. Portanto, o polinômio de grau 1:
é aquele que melhor se ajusta aos pontos obtidos, entre
todos os possíveis polinômios de grau 1.
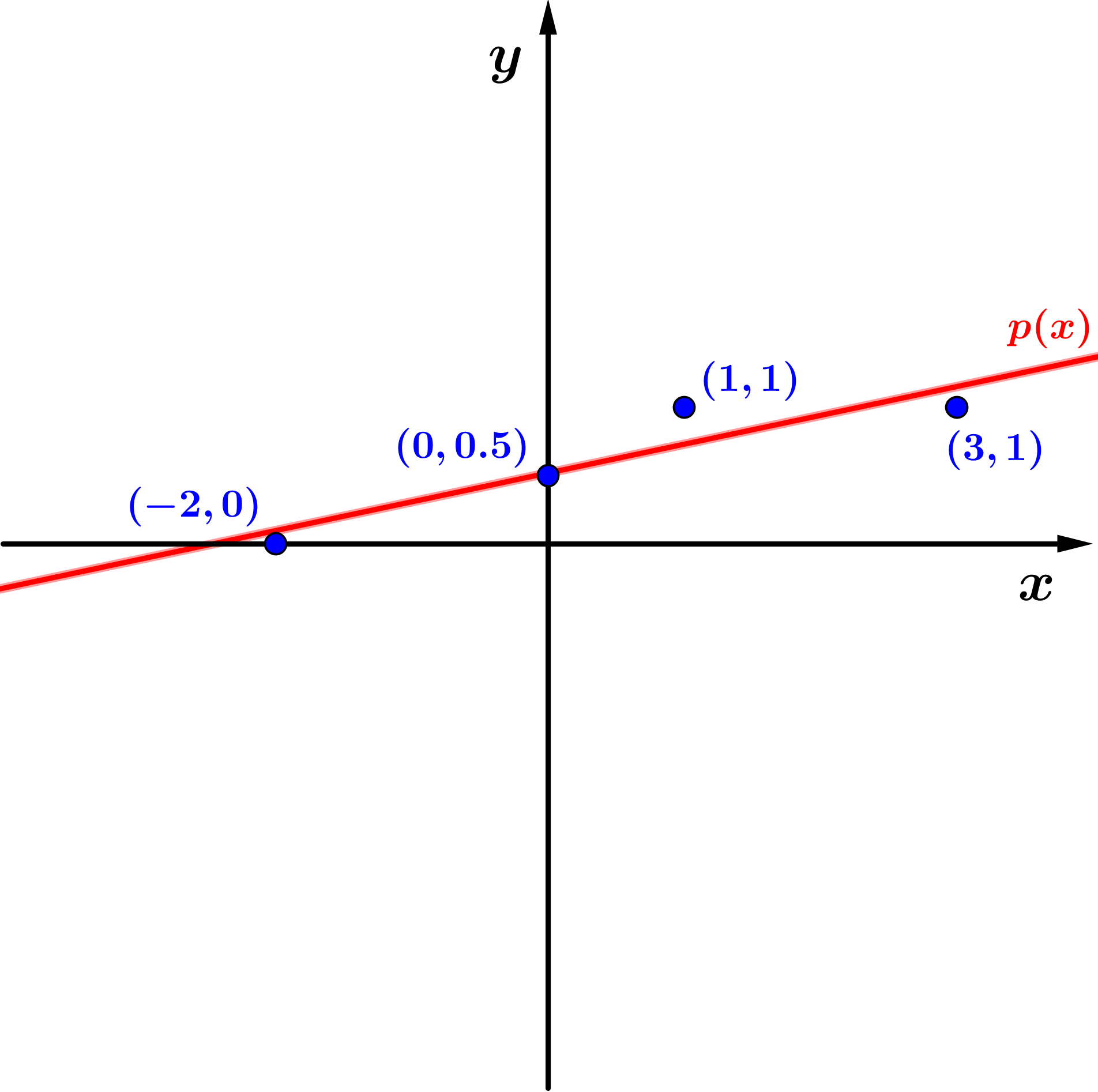
Figura
2: o polinômio
é o que melhor se ajusta aos pontos.
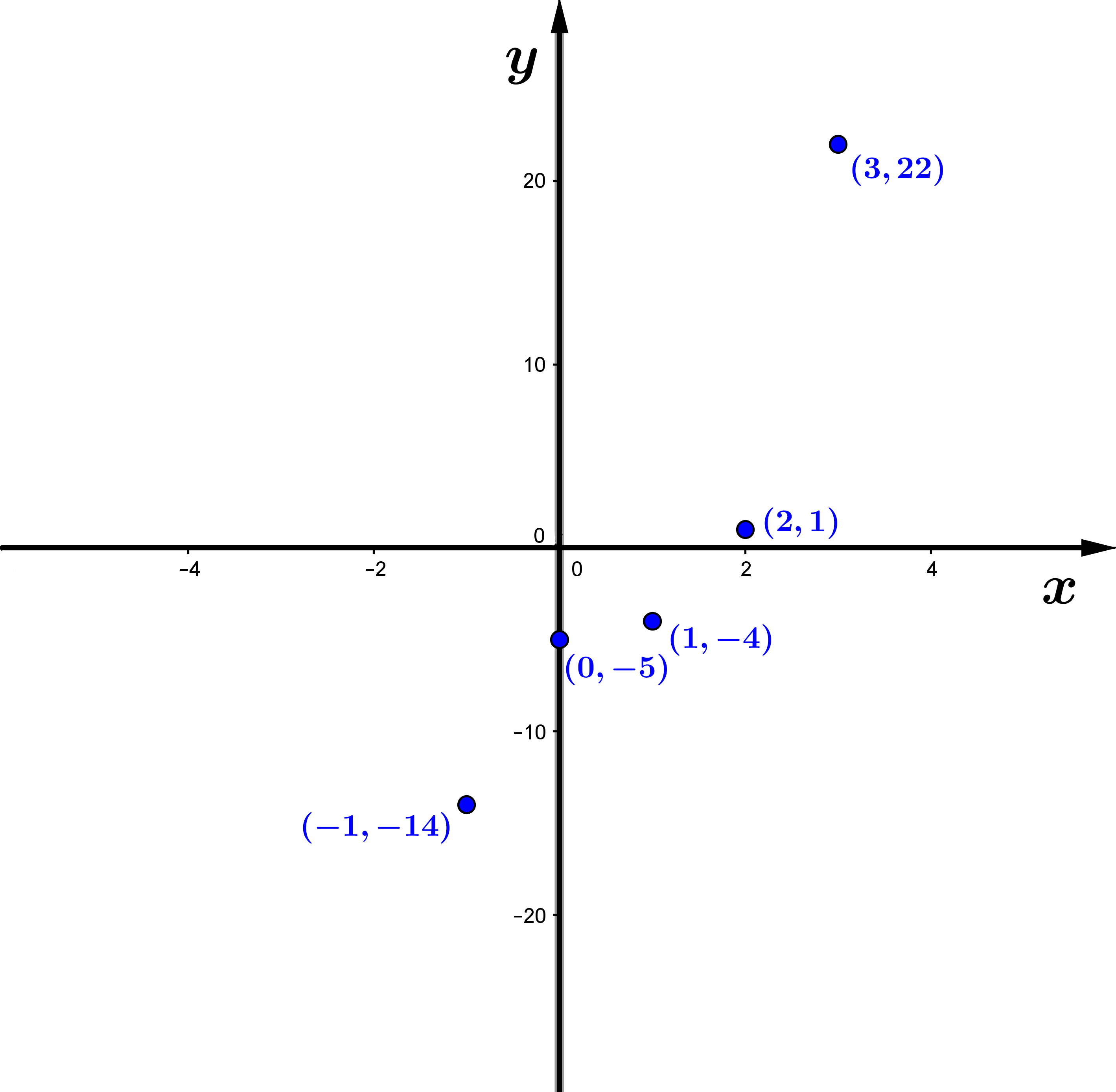
Exemplo 2: suponha que obtivemos experimentalmente
a seguinte tabela de dados:
x
|
-1
|
0
|
1
|
2
|
3
|
y
|
-14
|
-5
|
-4
|
1
|
22
|
Analisando estes pontos no plano cartesiano, podemos
supor que os valores de
e
estão relacionados por um polinômio de grau 3:
Figura 3: um polinômio de grau 3 é uma
opção de ajuste aos pontos tabelados.
Queremos encontrar o polinômio cúbico
de melhor ajuste dos pontos
e
.
Se os pontos satisfizessem a equação polinomial, então:
Escrevemos este sistema na forma matricial:
Vamos determinar uma solução de quadrados mínimos
utilizando a fatoração ortogonal da matriz
.
Utilizando uma precisão de 4 casas decimais, obtemos:
onde é
uma matriz ortogonal. Da matriz
extraímos a matriz
triangular superior:
Temos que
,
onde:
Do vetor
extraímos o vetor:
Assim, temos o sistema triangular superior:
cuja solução
é também uma solução de quadrados mínimos do sistema
inicial. Portanto, o polinômio de grau 3:
é o que melhor se ajusta aos pontos tabelados, entre todos
os polinômios de grau 3.
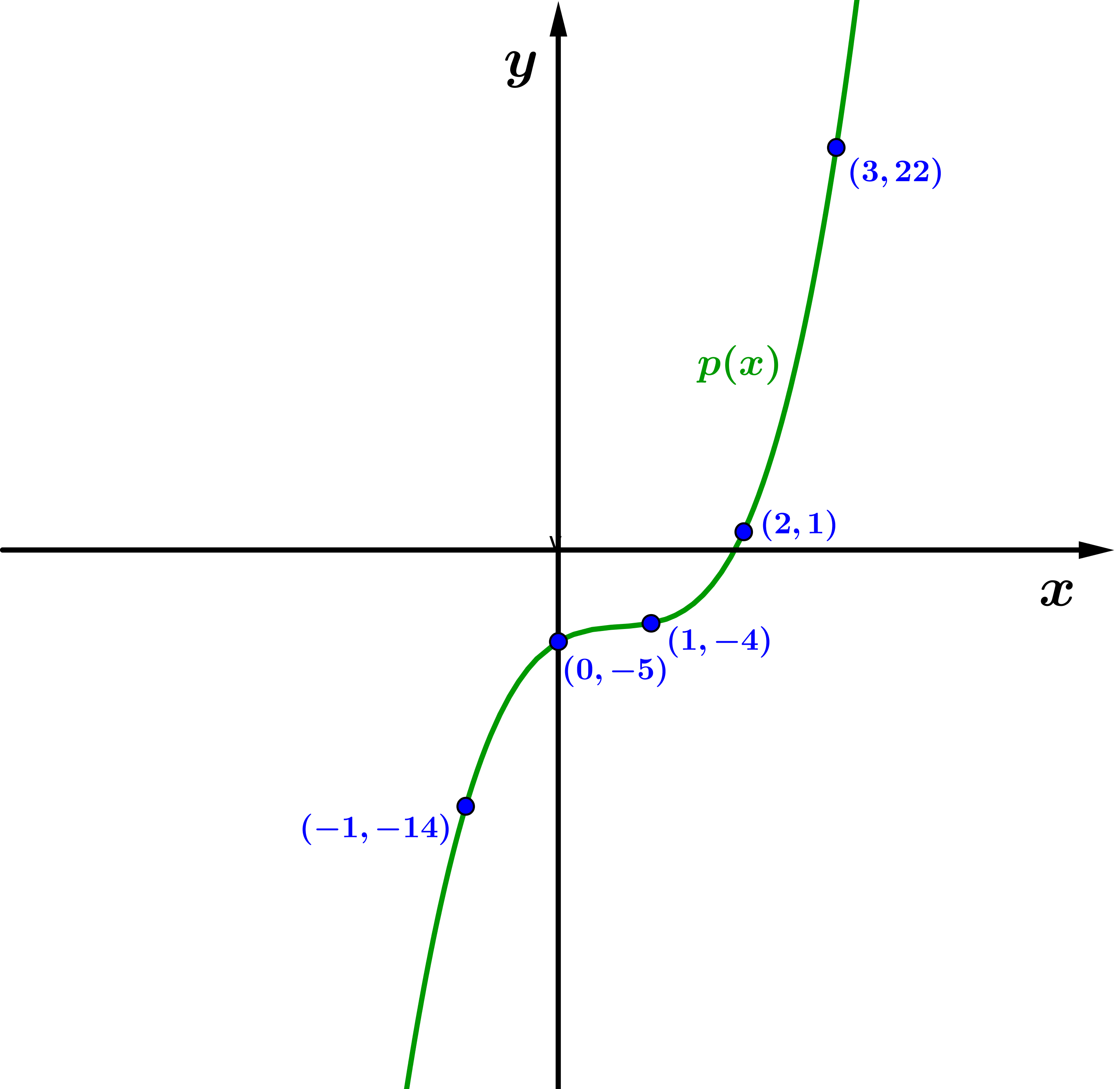
Figura 4: o
polinômio
é o que melhor se ajusta aos pontos.
|