|
|
Problema 1 (Previsão Populacional)
A tabela abaixo fornece o número de habitantes no
Brasil (em milhões) em alguns anos entre 1920 e 2010:
Ano()
|
1920
|
1940
|
1950
|
1960
|
1970
|
1980
|
1991
|
2000
|
2010
|
|
1
|
3
|
4
|
5
|
6
|
7
|
8.1
|
9
|
10
|
Habitantes()
|
30.6
|
41.2
|
51.9
|
70.2
|
93.1
|
119.0
|
146.2
|
169.8
|
190.7
|
Realizamos uma mudança de escala (na variável tempo
),
,
para facilitar os cálculos e reduzir os erros de
arredondamentos.
Uma curva logística é empregada para descrever um processo
de crescimento populacional. Uma expressão analítica para
esta curva é:
onde é a
saturação do processo, que representa o limite desta
população quando
.
Neste exemplo, vamos considerar
e encontrar uma curva logística para a população do Brasil
através do método de quadrados mínimos, utilizando os
dados tabelados.
Note que esta curva de ajuste não é linear nos
parâmetros
e
e, neste caso, precisamos realizar algumas transformações
em sua expressão, que resultem em uma curva linear nos
parâmetros a serem determinados. No caso, temos:
Definimos:
e teremos então:
Vamos ajustar
por
.
Utilizando a notação
e
,
a curva
é linear nos parâmetros
e
.
Estes parâmetros podem ser obtidos pelo método dos
quadrados mínimos lineares e, fazendo as substituições
adequadas, obtém-se os valores para
e
.
Utilizando os dados tabelados para
,
calculamos os valores para
e
:
|
1
|
3
|
4
|
5
|
6
|
7
|
8.1
|
9
|
10
|
|
30.6
|
41.2
|
51.9
|
70.2
|
93.1
|
119.0
|
146.2
|
169.8
|
190.7
|
|
15.3399 |
11.1359 |
8.6339 |
6.1225 |
4.3706 |
3.2017 |
2.4200 |
1.9446 |
1.6219 |
|
2.7305 |
2.4102 |
2.1557 |
1.8120 |
1.4749 |
1.1637 |
0.8838 |
0.6651 |
0.4836 |
Supondo que estes dados satisfazem a expressão
,
obtemos o seguinte sistema linear na forma matricial
:
Pela fatoração ortogonal da matriz dos coeficientes,
obtemos a matriz ortogonal e a
matriz triangular superior:
tais que
.
Logo,
,
onde usamos a propriedade da matriz ortogonal:
.
Chamando
,
temos:
Como abaixo da linha 2 a matriz é
nula, esta parte do sistema não depende do vetor
.
Assim, da matriz e
do vetor
extraímos a matriz
e o vetor
,
respectivamente, dados por:
e resolvemos o sistema linear
:
obtendo a solução
e
.
Agora, podemos determinar os parâmetros
e
:
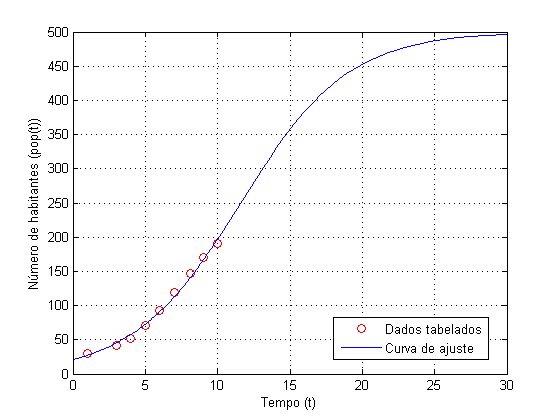
Portanto, uma aproximação da curva logística para a
população do Brasil é:
Vamos calcular os resíduos ponto a ponto da curva de
ajuste com relação aos dados tabelados para
.
Para isto, obtemos o vetor de resíduos
.
Com esta notação queremos dizer que cada coordenada do
vetor é
dada pelo valor de
menos o valor da função
para cada valor tabelado do tempo
.
Temos:
|
30.6 |
41.2 |
51.9 |
70.2 |
93.1 |
119.0 |
146.2 |
169.8 |
190.7 |
|
27.3045 |
45.0505 |
57.3858 |
72.5599 |
90.9222 |
112.7060 |
140.6572 |
166.4163 |
197.5527 |
|
3.2955 |
-3.8505 |
-5.4858 |
-2.3599 |
2.1778 |
6.2940 |
5.5428 |
3.3837 |
-6.8527 |
A soma dos quadrados dos resíduos é
.
Construindo um gráfico com os dados tabelados para o
número de habitantes no Brasil e a curva de ajuste, temos:
Podemos prever o número de habitantes no ano de 2017, por
exemplo, calculando o valor da função
para
:
o que indica que a população atingirá aproximadamente
220481900 habitantes.
Voltar ao Topo.
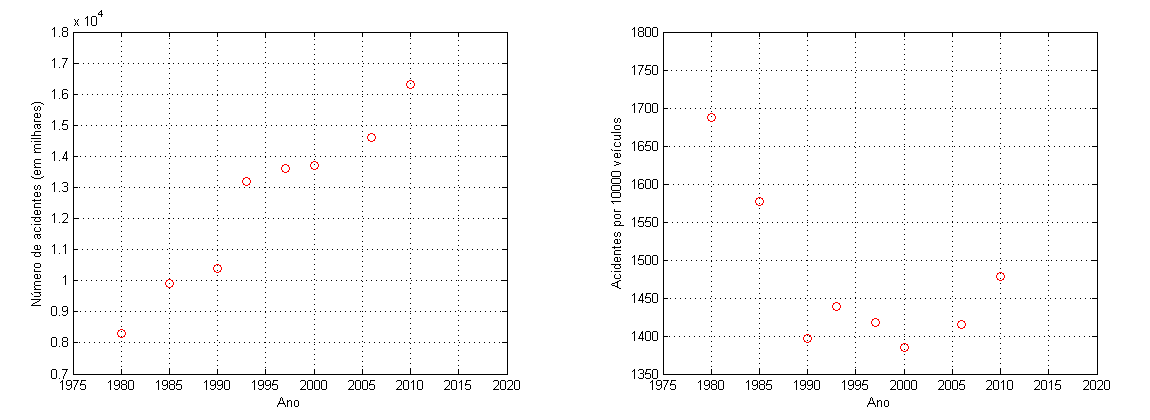
Problema 2 (Número de Acidentes com
Veículos)
A tabela a seguir mostra o número total de acidentes
com veículos motorizados e o número de acidentes por 10000
veículos no Brasil em alguns anos entre 1980 e 2010.
Ano
|
Número
de Acidentes
(em milhares)
|
Acidentes
por
10000 veículos
|
1980
|
8300
|
1688
|
| 1985 |
9900 |
1577 |
| 1990 |
10400 |
1397 |
| 1993 |
13200 |
1439 |
| 1997 |
13600 |
1418 |
| 2000 |
13700 |
1385 |
| 2006 |
14600 |
1415 |
| 2010 |
16300 |
1478 |
Estes valores não são reais e estamos utilizando-os apenas
como exemplo. Representamos os dados através do tempo (em
anos) em dois gráficos, da seguinte forma:
Vamos calcular uma regressão linear (ajustando por um
polinômio de grau 1) do número de acidentes no tempo, e
uma regressão quadrática (ajustando por um polinômio de
grau 2) do número de acidentes por 10000 veículos no
tempo. Podemos utilizar estas curvas de ajuste para prever
os dados no ano 2017, por exemplo. Isto é chamado análise
de série temporal, visto que são regressões no
tempo, e é utilizado para se ter uma previsão dos dados no
futuro.
Em problemas como este, envolvendo datas contemporâneas, é
interessante transladar os dados iniciais antes dos
cálculos, pois isto reduzirá os erros de arredondamento.
Assim, no lugar dos valores 1980, 1985, ..., 2010
utilizaremos 0, 5, ..., 30. Para facilitar, também podemos
utilizar 8.3, 9.9, ..., 16.3 no lugar de 8300000, 9900000,
..., 16300000.
Primeiramente, vamos obter um ajuste linear do número de
acidentes no tempo, ou seja, queremos ajustar os dados
tabelados por um polinômio da forma:
onde
representa o tempo (em anos) e
o número de acidentes naquele ano. Supondo que os valores
tabelados satisfazem esta relação, obtemos o sistema
linear na forma matricial
:
Este sistema é claramente inconsistente. Utilizaremos o
método de quadrados mínimos para obter uma solução
que minimiza
.
Pela fatoração ortogonal da matriz
,
obtemos a matriz
ortogonal e a matriz triangular superior:
tais que
.
Temos então:
,
uma vez que a matriz é
ortogonal. Chamando
,
temos:
Da matriz e
do vetor
podemos extrair a matriz
e o vetor
,
respectivamente, dados por:
e resolvemos então o sistema linear:
obtendo a solução
e
.
Como esta é uma solução exata de
,
temos que e,
portanto, a soma dos quadrados dos resíduos de
,
que é igual a dos resíduos de
,
é dada pela parte do vetor que
sobrou ao extrairmos o vetor
,
assim:
Este valor é mínimo, visto que a solução obtida é solução
de quadrados mínimos do sistema
.
Portanto, obtivemos os coeficientes de um polinômio de
grau 1 que melhor se ajusta aos dados tabelados:
cujo gráfico representamos a seguir:
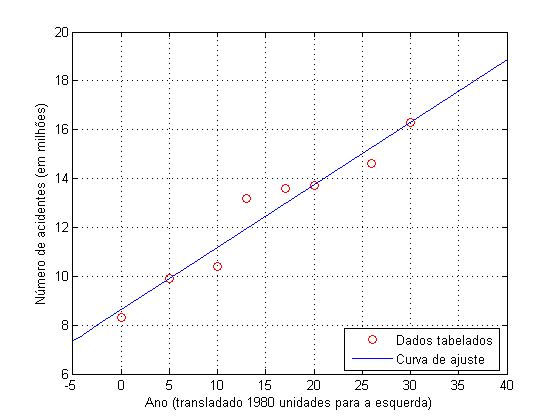
obtendo assim uma estimativa de 18092900 acidentes com
veículos motorizados no ano 2017.
Vamos agora ajustar o número de acidentes por 10000
veículos no tempo por um polinômio de grau 2, da forma:
onde
representa o tempo (em anos) e
o número de acidentes por 10000 veículos naquele ano. Para
facilitar os cálculos, no lugar de 1688, 1577, ..., 1478
utilizaremos 1.688, 1.577, ..., 1.478. Supomos que os
valores tabelados satisfazem este polinômio, obtendo o
sistema linear na forma matricial
:
Este sistema também é inconsistente e vamos utilizar o
método de quadrados mínimos para obter uma solução que
minimize
.
Na fatoração ortogonal da matriz
,
obtemos a matriz
ortogonal e a matriz triangular superior:
tais que
.
Temos então:
,
uma vez que a matriz é
ortogonal. Considerando
,
temos:
Da matriz e
do vetor
extraímos a matriz
e o vetor
:
Resolvemos então o sistema linear
:
obtendo a solução
,
e
.
A soma dos quadrados dos resíduos de
é dada apenas pela parte do vetor c que sobrou ao
extrairmos o vetor
,
assim:
Portanto, obtivemos os coeficientes de um polinômio de
grau 2 que melhor se ajusta aos dados tabelados:
cujo gráfico representamos a seguir:
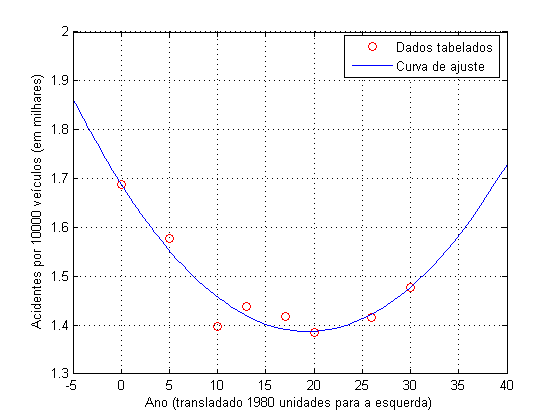
Podemos utilizar este polinômio para calcular
,
por exemplo:
obtendo assim uma estimativa de 1637.3 acidentes por 10000
veículos no ano 2017.
Voltar ao Topo.
Problema 3 (Resistência à Compressão
do Concreto)
A resistência à compressão do concreto,
,
decresce com o aumento da razão água/cimento,
(em galões de água por saco de cimento). Os valores da
resistência à compressão de três amostras para várias
razões de água por cimento estão mostrados na tabela a
seguir:
|
4.5 |
5.0 |
5.5 |
6.0 |
6.5 |
7.0 |
7.5 |
8.0 |
8.5 |
9.0 |
|
7000 |
6125 |
5237 |
4665 |
4123 |
3810 |
3107 |
3070 |
2580 |
2287 |
Podemos representar estes valores graficamente da seguinte
forma:
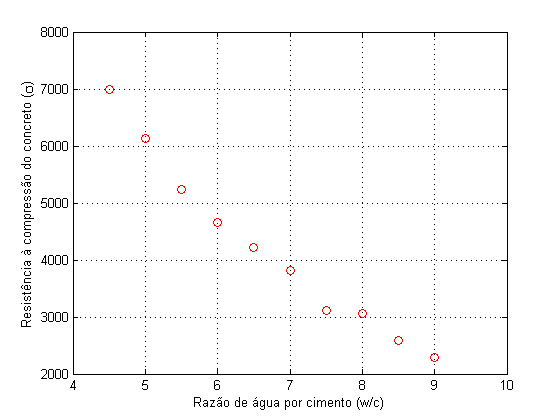
Estamos interessados em obter uma relação entre a
resistência à compressão do concreto e a razão
água/cimento. Observando o gráfico, podemos supor que
estes valores se relacionam, aproximadamente, por uma
função exponencial do tipo:
.
Para modelar este problema de forma linear, rearranjamos a
equação aplicando propriedades do logaritmo da seguinte
forma:
Chamando
e
,
temos que:
Utilizaremos o método de quadrados mínimos para determinar
os coeficientes
e
,
e posteriormente obter os coeficientes
e
.
Neste caso, encontraremos os parâmetros
e
que minimizam a soma de quadrados dos resíduos entre
e a função linear acima. Estamos resolvendo de forma
aproximada o problema real que é: minimizar a soma de
quadrados dos resíduos entre
e a função . Supondo que os pontos tabelados satisfazem a
relação acima, obtemos o sistema linear na forma matricial
:
Esse sistema é claramente inconsistente e queremos obter
uma solução de quadrados mínimos, que minimiza
.
Obtendo a fatoração ortogonal
da matriz dos coeficientes deste sistema, determinamos a
matriz
ortogonal e a matriz triangular superior:
Como
,
temos que
,
uma vez que é
uma matriz ortogonal. Chamando
,
temos:
Da matriz e
do vetor
extraímos a matriz triangular superior
e o vetor
,
respectivamente, dados por:
Resolvemos então o sistema linear
:
obtendo a solução
e
,
que é a solução de quadrados mínimos do sistema
.
Como esta é uma solução exata do sistema
,
temos que e,
portanto, a soma dos quadrados dos resíduos de
,
que é igual a dos resíduos de
,
é dada pela parte do vetor que
sobrou ao extrairmos o vetor
,
ou seja:
Com os coeficientes
e
determinados, temos:
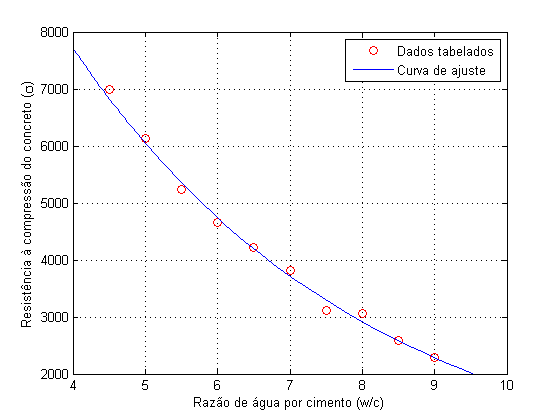
Portanto, os dados tabelados podem ser ajustados pela
função dada por:
Assim, obtivemos uma curva de ajuste à tabela que nos
fornece uma melhor estimativa da resistência à compressão
do concreto dada uma razão água/cimento qualquer.
Voltar ao Topo.
Problema 4 (Quantidade Ideal de
Calorias)
A tabela a seguir relaciona a quantidade ideal de
calorias, em função da idade e do peso, para homens que
possuem atividade física moderada e vivem a uma
temperatura ambiente de 20ºC.
|
25
|
45
|
65
|
50
|
2500
|
2350
|
1950
|
60
|
2850
|
2700
|
2250
|
70
|
3200
|
3000
|
2550
|
80
|
3550
|
3350
|
2800
|
Usando o método de quadrados mínimos, vamos encontrar uma
expressão da forma:
que aproxime os dados da tabela, onde
representa o peso (em kg), a
idade (em anos) e a
quantidade ideal de calorias. Supondo que os dados
tabelados satisfazem esta expressão, obtemos o seguinte
sistema linear na forma matricial
:
Claramente, este sistema é inconsistente. Obtendo a
fatoração ortogonal da matriz dos coeficientes,
determinamos a matriz
ortogonal e a matriz triangular superior:
tais que
.
Temos então que:
,
uma vez que é
ortogonal. Chamando
,
temos:
Como abaixo da linha 2 a matriz é
nula, esta parte do sistema não depende do vetor
.
Assim, da matriz e
do vetor
extraímos a matriz
e o vetor
,
respectivamente, dados por:
Resolvemos então o sistema linear
:
obtendo a solução
e
,
que é a solução de quadrados mínimos do sistema original
.
Como esta é solução exata do sistema
,
temos que
,
logo a soma dos quadrados dos resíduos de
,
que é igual a dos resíduos de
,
é calculada apenas com a parte que sobrou do vetor ao
extrairmos o vetor
.
Temos:
Portanto, obtivemos uma melhor aproximação para os dados
da tabela com a expressão:
Com isto podemos, por exemplo, determinar a cota
aproximada de calorias para um homem de 30 anos com 70
quilos:
ou para um homem de 50 anos e 78 quilos:
Voltar ao Topo.
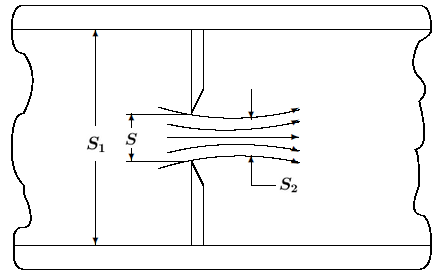
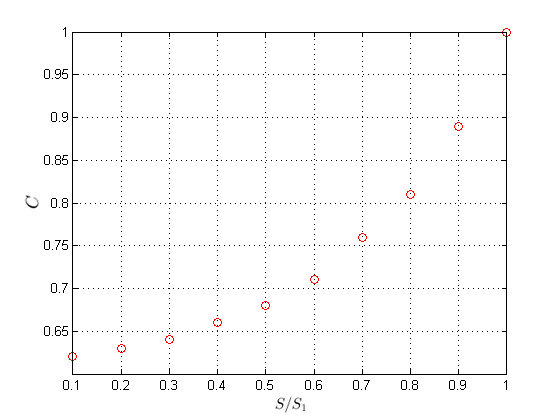
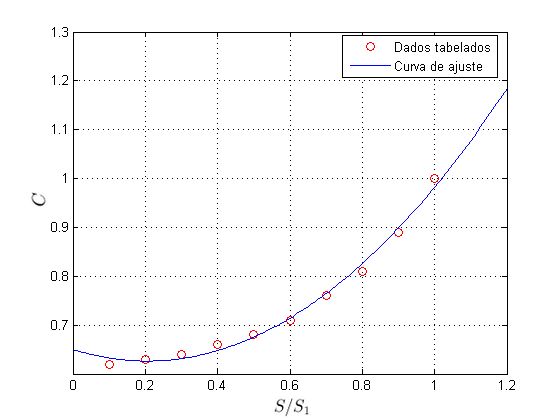
Problema 5 (Placas de Orifício)
Placas de orifício com bordas em canto (ou faca) são
muito utilizadas na medição da vazão de fluidos através de
tubulações. A figura a seguir mostra uma placa de
orifício, que tem os seguintes parâmetros geométricos
representativos:
-
:
área da seção reta do orifício.
-
:
área da seção reta da tubulação.
-
:
seção reta no ponto de maior contração após o
orifício.
O coeficiente é
dado em função da razão
,
e valores experimentais desse coeficiente estão listados
na tabela a seguir:
|
0.10 |
0.20
|
0.30
|
0.40
|
0.50
|
0.60
|
0.70
|
0.80
|
0.90
|
1.00
|
|
0.62 |
0.63
|
0.64
|
0.66
|
0.68
|
0.71
|
0.76
|
0.81
|
0.89
|
1.00
|
Representando estes dados em um gráfico, temos:
Este sistema é inconsistente e queremos, portanto, obter
uma solução que minimize a norma do resíduo
.
Na fatoração ortogonal da matriz dos
coeficientes, determinamos a matriz
ortogonal e a matriz triangular superior:
tais que
.
Então
,
pois é
uma matriz ortogonal. Chamando
,
temos o sistema:
Como abaixo da linha 3 a matriz é
nula, os valores abaixo da linha 3 de não
dependem do vetor no
sistema. Podemos então extrair a matriz
e o vetor
dados por:
e resolvemos o sistema
:
Este sistema é determinado e apresenta como única solução:
,
e
.
Temos que
e, portanto, a soma dos quadrados dos resíduos de
,
que é igual a dos resíduos de
,
é calculada apenas com a parte que sobrou do vetor ao
extrairmos o vetor
.
Neste caso, temos:
,
e esta é a norma mínima. Portanto, com a solução de
quadrados mínimos, obtivemos os coeficientes do polinômio
de grau 2:
que melhor ajusta os dados tabelados.
Voltar ao Topo.
|